Controls
Tracing its origins to J. C. Maxwell's early work on speed governors (1868), control theory has evolved to play an integral role in the majority of modern engineering systems. Mechanical systems are becoming ever more complex, yet performance requirements are increasingly stringent. At the same time, dramatic developments in microelectronics and computers over the past few decades make it possible to use sophisticated signal processing and control methodologies to enhance system performance.
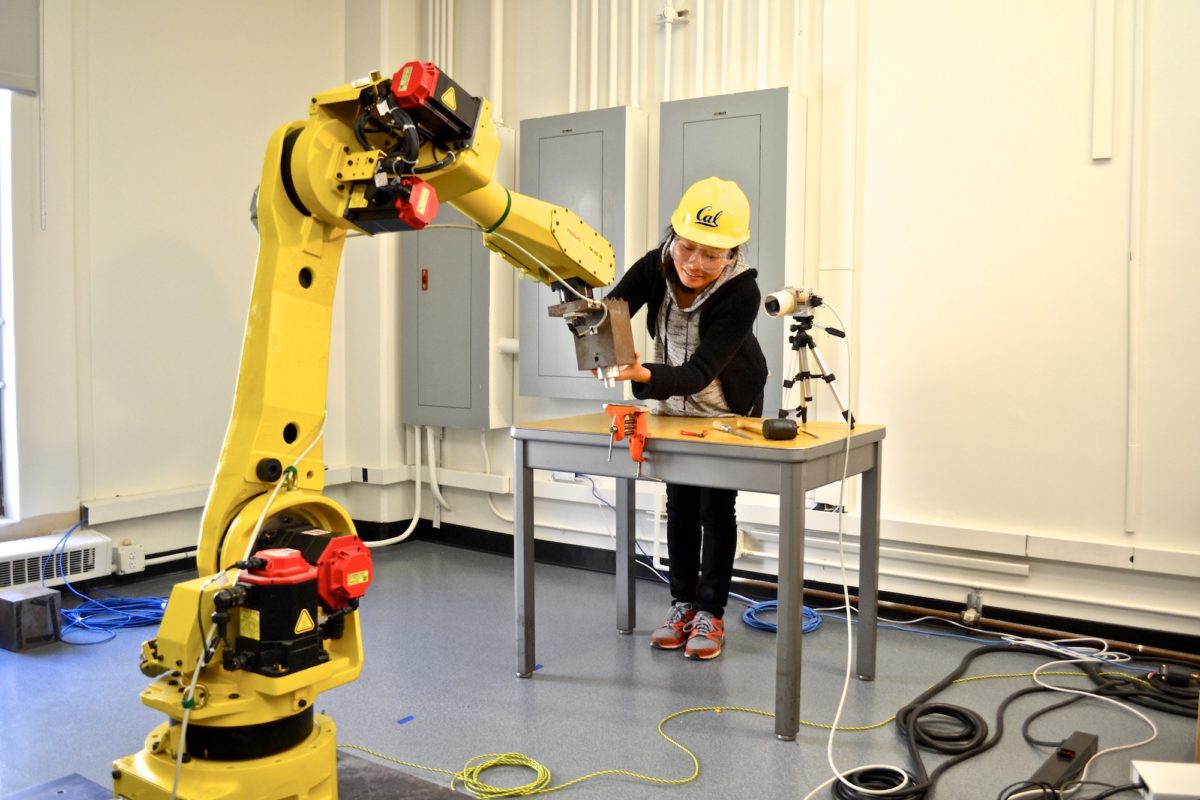
The Department's control group addresses the broad spectrum of control science and engineering from mathematical theory to computer implementation. On the theoretical side, faculty and graduate students pursue research on adaptive and optimal control, digital control, robust control, modeling and identification, learning, intelligent control and nonlinear control, to name a few. On the application side, research teams are engaged in projects involving a variety of mechanical systems such as robot manipulators, manufacturing systems, vehicles and intelligent vehicle highway systems (IVHS), motion control systems, computer storage devices and biomedical systems. Berkeley prides itself on the tradition of nurturing the delicate balance between the theoretical and applied aspects of research. The control group has taken the lead in the field of mechatronics and IVHS integrating electromechanical/machine-information.
We offer a variety of graduate courses to prepare students for the advanced research and development demands they will encounter in their professional careers. These courses cover linear system theory, digital control, nonlinear control, adaptive control, modeling and identification, multivariable robust control theory, real time use of microcomputers for signal processing and control, and control of robot manipulators. We also encourage our graduate students to take courses offered in other departments such as Electrical Engineering and Computer Science.
The Major Field Advisors for each research area are listed here.
Core Faculty







Faculty with research interests that relate to Controls issues include Professors Murat Arcak, David M. Auslander, David Horsley, and S. Shankar Sastry.